Robust robot planning in dynamic, human-centric environments remains a core challenge
due to the need to handle multimodal uncertainty, adapt in real-time, and maintain safety.
Optimization-based planners
offer explicit constraint handling but performance relies on initialization quality.
Learning-based planners better capture multimodal possible solutions but struggle to enforce constraints
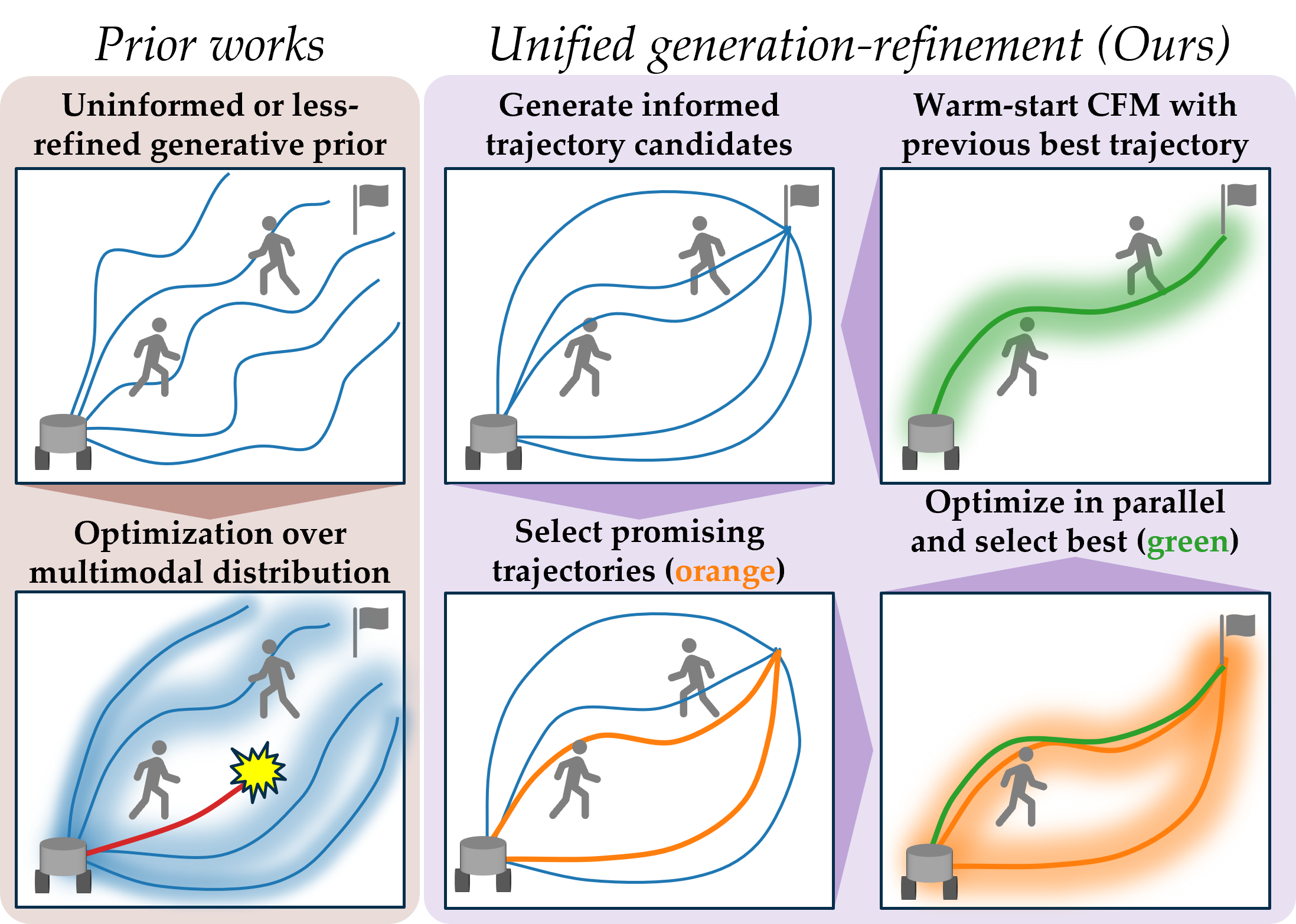
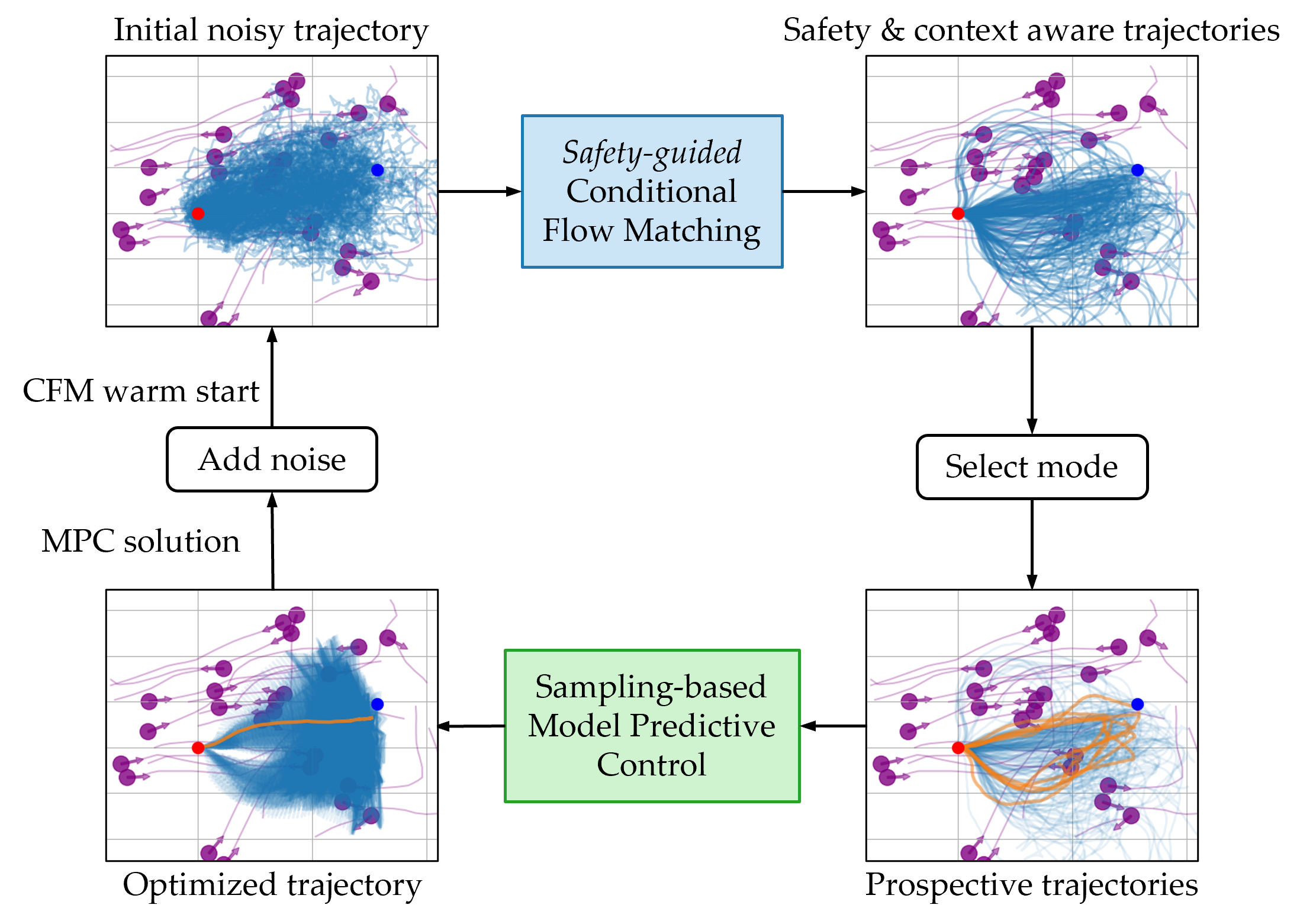
such as safety. In this paper, we introduce a unified generation-refinement framework bridging learning
and optimization with a novel reward-guided conditional flow matching (CFM) model and model
predictive path integral (MPPI) control. Our key innovation is in the incorporation of a
bidirectional information exchange: samples from a reward-guided CFM model provide informed
priors for MPPI refinement, while the optimal trajectory from MPPI warm-starts the next CFM generation.
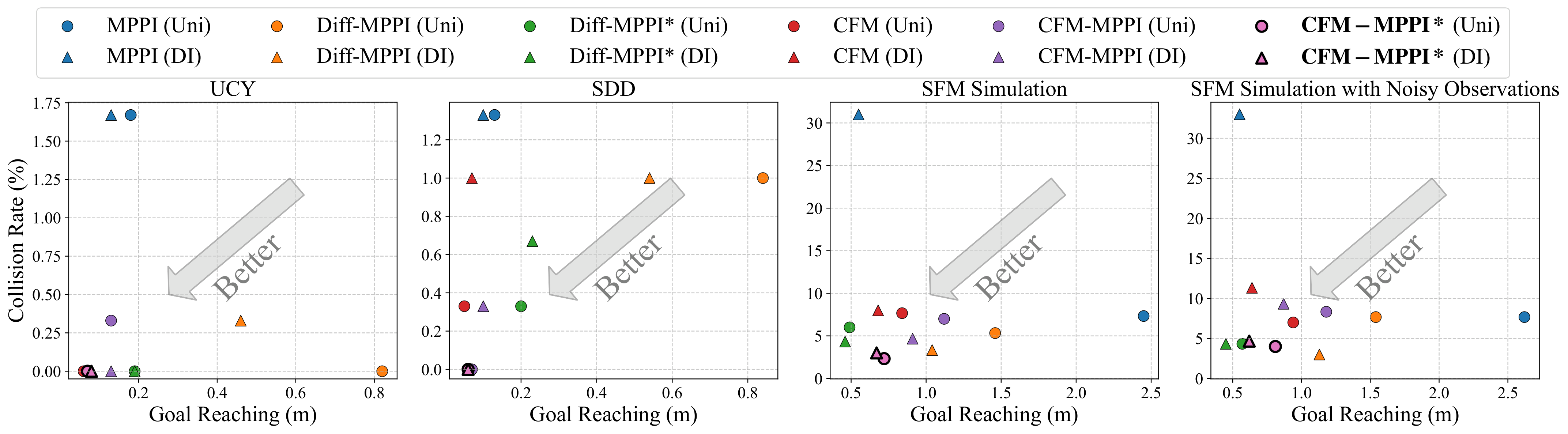
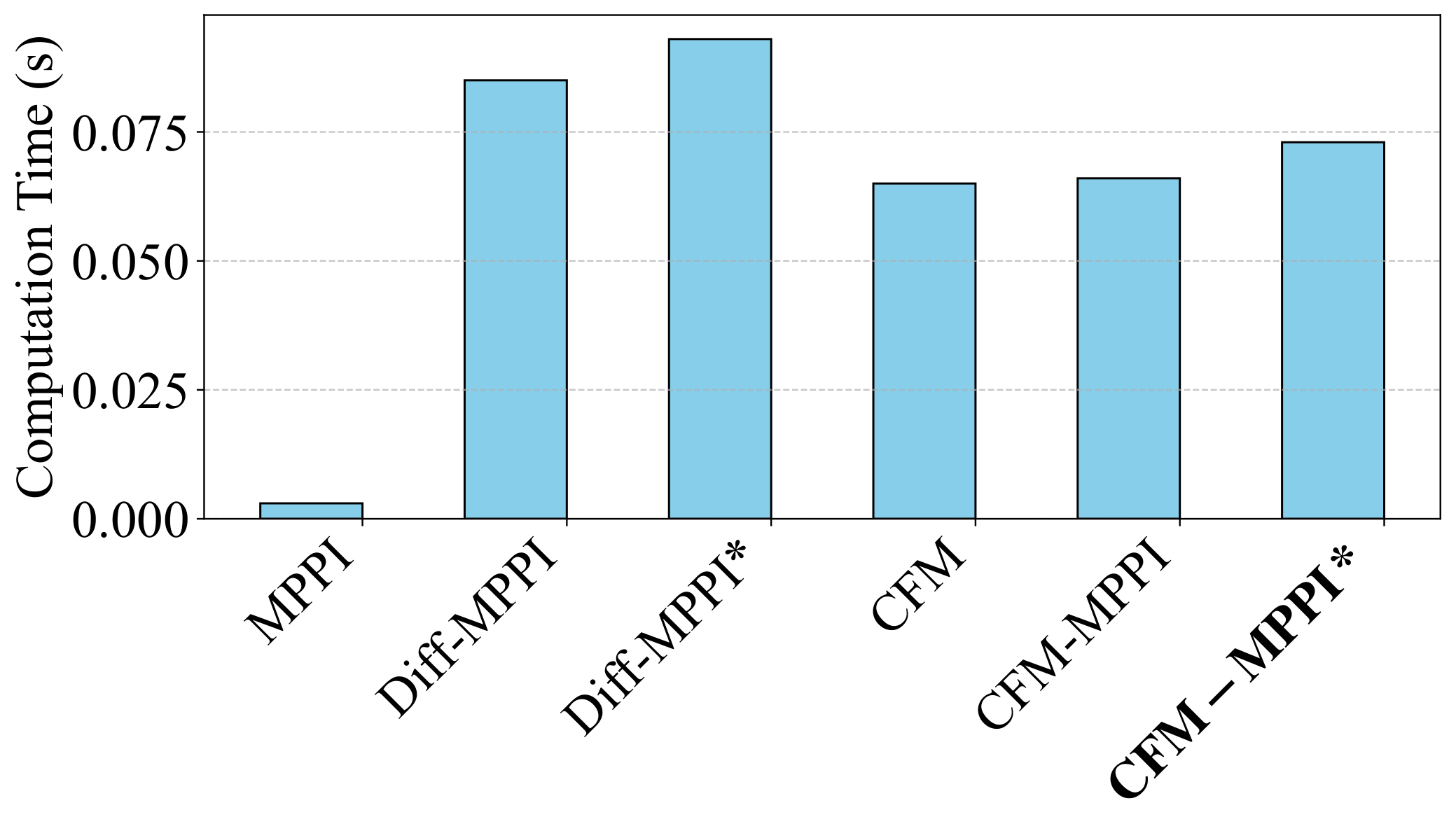
Using autonomous social navigation as a motivating application, we demonstrate that our approach can
flexibly adapt to dynamic environments, enforcing safety compliance in real-time.